Manual installation¶
The following instructions will help you to set up a development environment for the Robot Learning Lab.
Setting up ROS¶
First you need to install the Robot Operating System (ROS). Follow the official installation instructions. You can either select ROS Melodic Morenia or ROS Kinetic Kame. Both are supported, but ROS Melodic Morenia is recommended for a new installation.
Make sure to follow all the installation steps as described in the instructions, including installing the dependencies for building packages. One additional package needs to be installed as well:
sudo apt install python-catkin-tools
Creating the RLL workspace¶
The following commands create a new ROS workspace in your home folder and install the Robot Learning Lab SDK and the Robot Playground project into it:
mkdir ~/rll_ws
cd ~/rll_ws
catkin_init_workspace
wstool init src https://gitlab.ipr.iar.kit.edu/rll/rll_robot_playground_project/raw/master/robot_playground_project.rosinstall
rosdep install --from-paths src --ignore-src -r -y
catkin build
source devel/setup.bash
The last command adds the ROS Environment variables from the RLL packages to you bash session.
If you do not want to run this command every time you open an new shell, you can add it to your
bashrc:
echo "source ~/rll_ws/devel/setup.bash" >> ~/.bashrc
Testing the installation¶
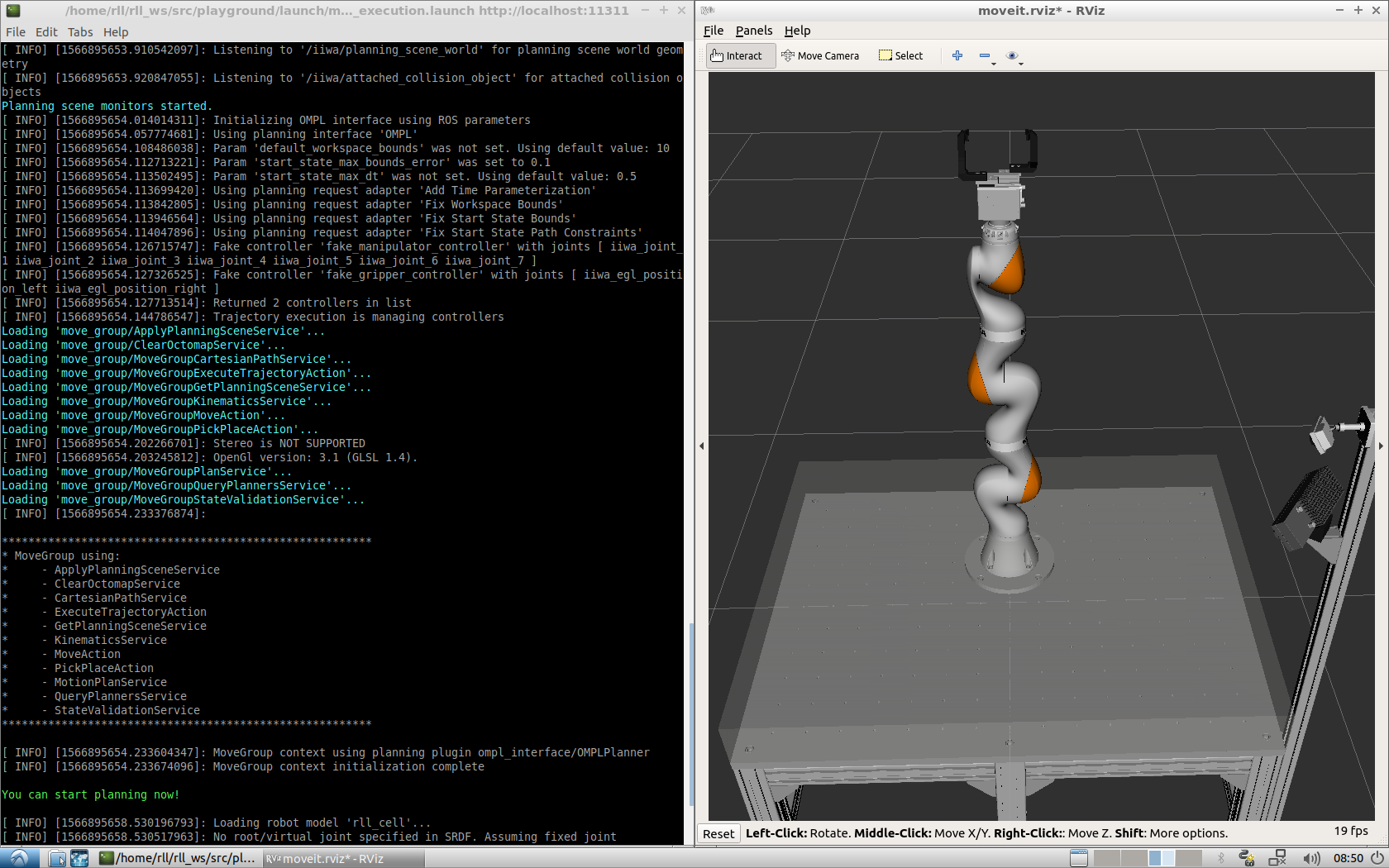
You can launch the visualization with the robot simulation to check if everything works correctly:
roslaunch rll_robot_playground_project moveit_planning_execution.launch
It should look similar to the screenshot below. You should have an RViz window with the robot workcell and the shell should print You can start planning now!.